
机器人原理及控制技术第09章 静态力
2024-12-10
4
0
144.5KB
20 页
10玖币
侵权投诉

第九章 静态力
Chapter Ⅸ Static Forces
9.1 引言
9.2 力和力距的表示
9.3 坐标系之间的力变换
9.4 等效关节力矩
9.5 通过关节力矩判断负载质量
9.6 利用腕力传感器判断负载质量
9.7 本章小结

9.1 引言 (Introduction)
本章介绍静态力和力距的表示方法,以及
它们在坐标系之间的变换和等效关节力矩的计算方法。
以及通过关节力矩和利用腕力传感器确定机械手负载物
体质量等问题。
9.2
9.2 力和力距的表示
力和力距的表示
(The Representation of Forces and Moments)
力和力距都是矢量,要相对于某个确定的坐标系来进行描述。矢量 f 表
示力,矢量 m 表示力矩。力与力矩合在一起用矢量 F表示,称为力向量 F。
例如一个力矢量 f = 10i + 0j – 150k 和一个力矩矢量 m = 0i –
100j + 0k,可用一个六维力向量表示为
F = [ 10 0 –150 0 –100 0 ] T
(9.1)
z
y
x
z
y
x
m
m
m
f
f
f
F
9.3 坐标系之间力的变换
(Transformation of Forces Between Coordinate
Frames)
虚功原理:所谓虚功原理是指假定有一个力向量 F作用于一个物体,
它引起一个微小的假想位移,称之为虚位移 D,由于物体实际上并未移
动,它在这个物体上所作的功称为虚功,且虚功为零。 即
δw = FT D = 0 (9.2)
其中 δw 表示虚功, D 表示虚位移的微分运动矢量
D = [ dx dy dz δx δy δz ]T (9.3)
F为力矢量
F = [ fx fy fz mx my mz ]T (9.4)

如果虚位移是由作用在物体上的另一个力向量造成的,它对物体的外
部作用效果相同。如果这个虚位移用坐标系 C来描述,那么就会得到相同的虚功,
即
δw = FT D = CFT CD (9.5)
即
FT D = CFT CD (9.6)
则有
C dx nx ny nz (p×n)x (p×n)y (p×n)z dx
C dy ox oy oz (p×o)x (p×o)y (p×o)z dy
C dz ax ay az (p×a)x (p×a)y (p×a)z dz
Cδx = 0 0 0 nx ny nz δx (9.7)
Cδy 0 0 0 ox oy oz δy
Cδz 0 0 0 ax ay az δz
令
CD = J D
(9.8)
从而得到
FTD = CFT J D (9.9)

上式适用于任何虚位移 D,于是可以得到
FT = CFT J (9.10)
即 F = JT CF
(9.11)
亦即
fx nx ox ax 0 0 0 cfx
fy ny oy ay 0 0 0 cfy
fz nz oz az 0 0 0 cfz
mx = (p×n)x (p×o)x (p×a)x nx ox ax
cmx
my (p×n)y (p×o)y (p×a)y ny oy ay
cmy
mz (p×n)z (p×o)z (p×a)z nz oz az
cmz
(8.12
)

上式求逆得
cfx nx ny nz 0 0 0 fx
cfy ox oy oz 0 0 0 fy
cfz ax ay az 0 0 0 fz
cmx = (p×n)x (p×n)y (p×n)z
nx ny nz mx
cmy (p×o)x (p×o)y (p×o)z
ox oy oz my
cmz
(p×a)x (p×a)y (p×a)z ax ay az mz
将上式的上三行和下三行互换有
cmx nx ny nz (p×n)x (p×n)y (p×n)z mx
cmy ox oy oz (p×o)x (p×o)y (p×o)z my
cmz ax ay az (p×a)x (p×a)y (p×a)z mz
cfx = 0 0 0 nx n y nz fx
cfy 0 0 0 ox oy oz fy
cfz 0 0 0 ax ay az fz
(9.13
)
(9.14
)
由式( 9.14 )和第五章的式( 5.39 )可知,力和力矩在坐标系之间的
变换形式与微分平移和微分旋转的变换形式相同,则有
cmx = n · (( f × p ) + m)
cmy = o ·(( f × p ) + m)
cmz = a ·(( f × p ) + m)
cfx = n · f
cfy = o · f
cfz = a · f
式中的 n,o,a 和p在第五章 5.5 节中定义过,它们是微分坐
标变换式的列向量,力矩的变换形式与微分平移一样,而力的变换形式与微
分旋转一样。
(9.16
)
(9.15
)

【例 9.1 】
一个机械手及其末端执行器的位置
为ZT6E,要把一个螺杆插入表示为 OH
的孔眼,如图 9.1 所示。
Z T6 E = O H
末端执行器的坐标为
1 0 0 2
0 1 0 0
E = 0 0 1 10
0 0 0 1
在孔眼坐标系 H中,机械手要施加
的力是 f = 0i + 0j + 100k, 试求坐标系 T6
中的等价力和力矩。
200
1000
100
1000 100
z
x
y
y
xz
图 9.1 坐标系之间的力变
换
T6
H

解:由图 9.2 所示的变换图,我们可以得到微分坐标变换 E–1
1 0 0 –2
0 1 0 0
E–1 = 0 0 1 -10
0 0 0 1
于是 p = –2i + 0j – 10k,从而
i j k
f × p = 0 0 100 = 0i – 200j + 0k
–2 0 –10
f × p + m = 0i – 200j + 1000k
最后,由式 (9.15) 和(9.16) ,可得
T6m = 0i – 200j + 1000k
T6f = 0i + 0j + 100k
即 T6F = [ 0 0 100 0 –200 1000 ] T
Z T6E H O
图 9.2 变换图

摘要:
展开>>
收起<<
第九章静态力ChapterⅨStaticForces9.1引言9.2力和力距的表示9.3坐标系之间的力变换9.4等效关节力矩9.5通过关节力矩判断负载质量9.6利用腕力传感器判断负载质量9.7本章小结9.1引言(Introduction)本章介绍静态力和力距的表示方法,以及它们在坐标系之间的变换和等效关节力矩的计算方法。以及通过关节力矩和利用腕力传感器确定机械手负载物体质量等问题。9.29.2力和力距的表示力和力距的表示(TheRepresentationofForcesandMoments)力和力距都是矢量,要相对于某个确定的坐标系来进行描述。矢量f表示力,矢量m表示力矩。力与力矩合在一起用...
声明:本站为文档C2C交易模式,即用户上传的文档直接被用户下载,本站只是中间服务平台,本站所有文档下载所得的收益归上传人(含作者)所有。玖贝云文库仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对上载内容本身不做任何修改或编辑。若文档所含内容侵犯了您的版权或隐私,请立即通知玖贝云文库,我们立即给予删除!
相关推荐
-
政治理论应知应会 100 题
 2024-12-12 94
2024-12-12 94 -
第八章 实验八 测定金属的电阻率(同时练习使用螺旋测微器)
 2025-03-17 7
2025-03-17 7 -
第八章 第2讲 闭合电路欧姆定律
 2025-03-17 9
2025-03-17 9 -
第八章 第1讲 电路的基本概念和规律
 2025-03-17 8
2025-03-17 8 -
第八章 本章综合能力提升练
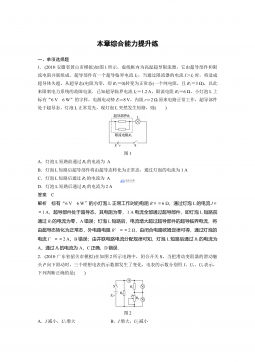 2025-03-17 4
2025-03-17 4 -
第八章 本章学科素养提升
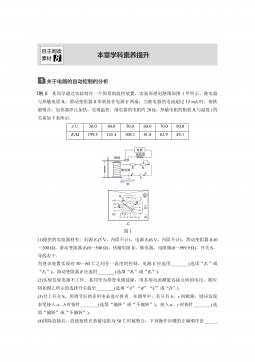 2025-03-17 9
2025-03-17 9 -
第二章 本章学科素养提升
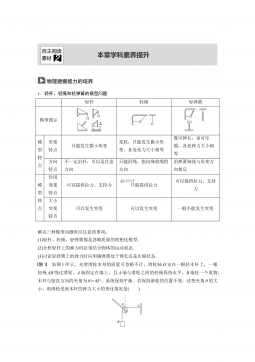 2025-03-17 8
2025-03-17 8 -
第九章 本章综合能力提升练
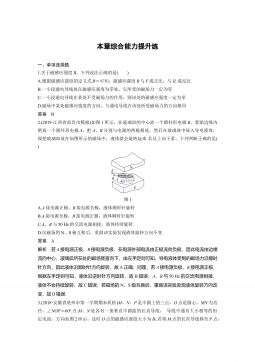 2025-03-17 12
2025-03-17 12 -
高考物理总复习-高中全程训练计划-物理-课练 42 选修3-3、3-4(二)
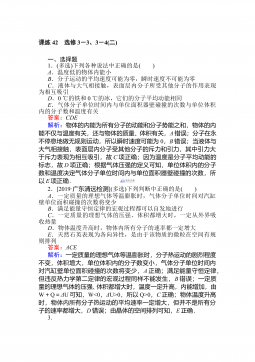
 2025-03-17 12
2025-03-17 12 -
高考物理总复习-高中全程训练计划-物理-课练 41 选修3-3、3-4(一)
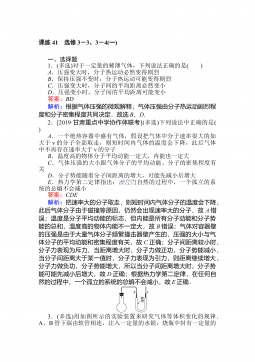 2025-03-17 11
2025-03-17 11
分类:高等教育
价格:10玖币
属性:20 页
大小:144.5KB
格式:PPT
时间:2024-12-10
作者详情

相关内容
-
第八章 本章学科素养提升
分类:高等教育
时间:2025-03-17
标签:无
格式:DOCX
价格:10 玖币
-
第二章 本章学科素养提升
分类:高等教育
时间:2025-03-17
标签:无
格式:DOCX
价格:10 玖币
-
第九章 本章综合能力提升练
分类:高等教育
时间:2025-03-17
标签:无
格式:DOCX
价格:10 玖币
-
高考物理总复习-高中全程训练计划-物理-课练 42 选修3-3、3-4(二)
分类:高等教育
时间:2025-03-17
标签:无
格式:DOC
价格:10 玖币
-
高考物理总复习-高中全程训练计划-物理-课练 41 选修3-3、3-4(一)
分类:高等教育
时间:2025-03-17
标签:无
格式:DOC
价格:10 玖币

